Dream walking for Fault-aware Locomotion control using EXplicit failure estimation and modulation (DreamFLEX)
Abstract
Recent advances in quadrupedal robots have demonstrated impressive agility and the ability to traverse diverse terrains. However, hardware issues, such as motor overheating or joint locking, may occur during long-distance walking or traversing through rough terrains leading to locomotion failures. Although several studies have proposed fault-tolerant control methods for quadrupedal robots, there are still challenges in traversing unstructured terrains.
In this paper, we propose DreamFLEX, a robust fault-tolerant locomotion controller that enables a quadrupedal robot to traverse complex environments even under joint failure conditions. DreamFLEX integrates an explicit failure estimation and modulation network that jointly estimates the robot's joint fault vector and utilizes this information to adapt the locomotion pattern to faulty conditions in real-time, enabling quadrupedal robots to maintain stability and performance in rough terrains. Experimental results demonstrate that DreamFLEX outperforms existing methods in both simulation and real-world scenarios, effectively managing hardware failures while maintaining robust locomotion performance.
Overview
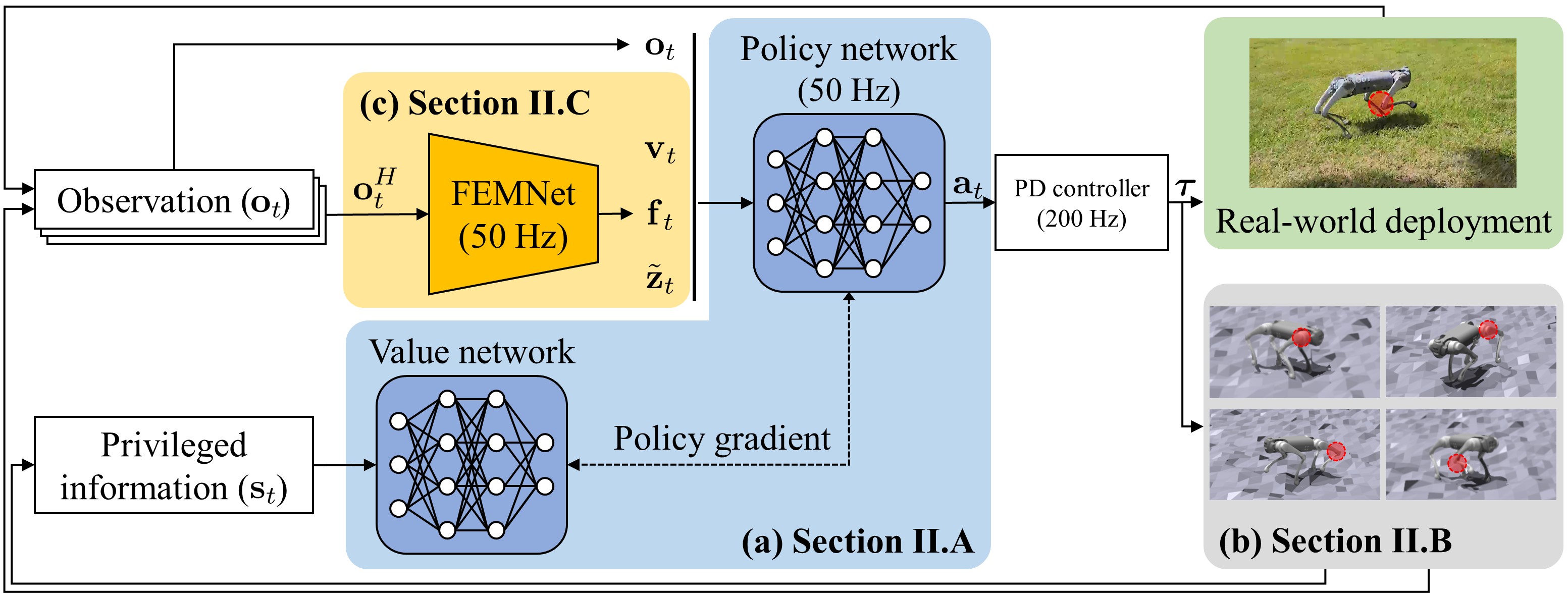
The overall architecture of DreamFLEX. (a) DreamFLEX is trained via deep reinforcement learning with only proprioceptive information based on an asymmetric actor-critic architecture. (b) To deal with abnormal situations for quadrupedal robots, each agent is trained with randomly assigned normal or faulty conditions. (c) Subsequently, a failure estimation and modulation network (FEMNet) estimates the failure vector and leverages it to modulate the latent embedding for the policy network. This framework enables the robot to autonomously estimate its failure joints and leverage this information to traverse various terrains.
Experiments
Gravel
Tree Root
Slope
Step
Stair
The stair terrain is quite challenging for small quadrupedal robots even in normal situations. Thanks to the robustness of the policy trained with DreamFLEX, the robot, even with fault joint, could safely walk through stair.
Actual Failure
FR motors of the robot were heated up and became disabled. DreamFLEX effectively in the actual failure of the robot, not only in manually-triggered failure scenarios
Indoor Complex Environment
The indoor course consists of steps, bumps, and soft terrains. Especially, the deformable soft terrain was not included in the training simulations. Nevertheless, the robot successfully overcame the obstacles and maintained stable locomotion despite the faults in the rear leg joints. This result demonstrates DreamFLEX can adapt to out-of-distribution (OOD) states and maintain stable locomotion in these terrains.